
آزمایش تایر در دنیای واقعی چالشهایی را در پردازش و مدلسازی دادهها ایجاد میکند. با این حال tiretechnologyinternational در گزارشی به راهحلی با عنوان فناوری WOM اشاره می کند که گفته می شود یک روش مهندسی کامل برای توصیف و مدلسازی تایر در دنیای واقعی است. فناوری اندازهگیری جدید از WOM Testing Technologies اکنون امکان ثبت مستقیم رفتار تایر در شرایط واقعی را فراهم میکند. کارلوس نرینی، مدیر عامل و یکی از بنیانگذاران شرکت، در گفتگو با وبسایت تایر تکنولوژی به چگونگی به وجود آمدن این راهحل اشاره می کند:
بیش از ۷۰ سال است که مدلسازی سیستم تایر و شاسی تا حد زیادی به آزمایش در محیط داخلی وابسته بوده است. با این حال، این محیطهای کنترلشده در شبیهسازی شرایط دنیای واقعی، بهویژه روی برف و یخ، که آزمایش در محیط داخلی با محدودیتهای جدی مواجه است، کم میآورند. با افزایش تقاضا برای شبیهسازیهای دینامیکی واقعی خودرو، ثبت دقیق رفتار تایر در محیطهای دنیای واقعی همچنان یک چالش بزرگ است – در درجه اول به دلیل دشواری اندازهگیری نیروها و گشتاورها بهطور مستقیم در سطح تماس.
دستگاه اندازهگیری جهتگیری چرخ (WOM) که توسط WOM Testing Technologies توسعه داده شده است و در جوایز ATTI امسال در فهرست نهایی نوآوری سختافزاری سال قرار گرفت، نشاندهنده یک پیشرفت در این زمینه است. این دستگاه با استفاده از تجهیزات اندازهگیری پیشرفته برای ثبت شعاع بارگزاری دینامیکی تایر در شرایط دنیای واقعی، رویکردی منحصر به فرد برای شبیهسازی چسبندگی طولی اتخاذ میکند. این فناوری تعبیهشده، اندازهگیری مستقیم رفتار تایر در شرایط دنیای واقعی را امکانپذیر میسازد و بر چالشهای متعددی که برای دههها مانع از توصیف دقیق تایر روی خودرو شده است، غلبه میکند، از جمله:
بهدست آوردن نیروها و گشتاورهای تایر در سطح تماس و سیستمهای مرجع مختلف، مانند ISO-C، ISO-H و ISO-W.
نصب ایمن حسگر روی چرخ متحرک بدون به خطر انداختن یکپارچگی.
انجام اندازهگیریهای دقیق در جادههای خیس، برفی و یخی.
چه چیزی در ابتدا شما را به زیر سوال بردن استفاده از شعاع غیرفیزیکی تایر برای توصیف چسبندگی طولی سوق داد؟
مسئله اصلی این است که شعاع مرجع سنتی (Re) هنگام اعمال در سناریوهای رانندگی و ترمزگیری در دنیای واقعی منجر به نسبت لغزش (SR) متناقض میشود. تعریف یک شرایط آزمایشگاهی که نتوان آن را مستقیماً در فیزیک دنیای واقعی مشاهده کرد، رویه مهندسی خوبی نیست.
به طور خاصتر، شعاع مرجع مرسوم یک اندازهگیری فیزیکی است که به رویدادی متفاوت از آنچه در شرایط رانندگی واقعی در تایر رخ میدهد، وابسته است. به همین دلیل است که من آن را غیرفیزیکی مینامم – وقتی تایر به طور فعال چسبندگی را در جاده ایجاد میکند، به صورت فیزیکی آشکار نمیشود.
شما اشاره میکنید که تحقیقات محدودی تأثیرات این قرارداد را بر مدلسازی تایر و شبیهسازی در زمان واقعی بررسی کردهاند. چه محدودیتهای شبیهسازی از قرارداد نسبت لغزش ناشی میشود و چرا تحقیقات در این زمینه محدود است؟
شبیهسازی فقط به اندازه مدلهایی که به آنها متکی است، دقیق است. استفاده از Re غیرفیزیکی، خطاهایی را در سرعت زاویهای چرخ در حلقه شبیهسازی ایجاد میکند – یکی از پارامترهای کلیدی برای کنترل پایداری و سیستمهای رانندگی خودکار. علاوه بر این، ناسازگاریهای تاریخی بین استانداردهای توصیف چسبندگی و مدلسازی نسبت لغزش، خطاهای بیشتری را در چسبندگی شبیهسازی شده ایجاد میکند.
تحقیقات در این زمینه در درجه اول به دلیل فقدان فناوری برای اعتبارسنجی نسبت لغزش در شرایط دنیای واقعی محدود شده است. از نظر تاریخی، آزمایش تایر تقریباً منحصراً در داخل انجام میشد و دانش تایر را بر اساس آنچه در یک محیط کنترل شده قابل مشاهده بود، شکل میداد. این یافتههای آزمایشگاهی هرگز در شرایط دنیای واقعی اعتبارسنجی نشدند، صرفاً به این دلیل که فناوری لازم وجود نداشت.
به همین دلیل است که ما دستگاه WOM را توسعه دادیم. فناوری ما اکنون درک ما از تایرها را تغییر میدهد و هنگامی که با تکنیکهای پیشرفته مهندسی دادههای مبتنی بر هوش مصنوعی ترکیب میشود، میتوانیم بینشهای ارزشمندی را از مجموعه دادههای گسترده و پیچیده استخراج کنیم. این پیشرفت در حال حاضر توصیف چسبندگی طولی را بهبود بخشیده است – و چیزهای بیشتری برای کشف وجود دارد.
تحقیقات شما از فناوری پیشرفته برای اندازهگیری شعاع بارگذاری پویا در شرایط دنیای واقعی استفاده میکند. چگونه این سیستم را توسعه دادید و از چه چیزی تشکیل شده است؟
این سیستم به عنوان بخشی از یک طرح تحقیقاتی کاربردی در سال ۲۰۱۸، با هدف استخراج مدل نیرو و گشتاور تایر (F&M) بر اساس اندازهگیریهای دنیای واقعی توسعه داده شد. ما متوجه شدیم که برای دستیابی به این هدف، باید دستگاهی اختراع کنیم که بتواند دادههای F&M را از نقطه اندازهگیری مبدل نیروی چرخ به سطح تماس تایر منتقل کند. بدون این تبدیل، به دست آوردن مدل تایر از اندازهگیریهای مستقیم روی خودرو غیرممکن خواهد بود. در حالی که مدل مبتنی بر شبیهسازی وجود دارند، اما فاقد قطعیت مطلق هستند- WOM برای پر کردن این شکاف ایجاد شد.
دستگاه WOM از چندین حسگر نوری تشکیل شده است که به طور محکم به یک زیرفریم متصل به صفحه چرخ متصل شدهاند. این دستگاه امکان اندازهگیری آنی سینماتیک چرخ، صفحه تماس، شعاع بارگذاری دینامیکی و نقطه تماس نظری (P) را فراهم میکند و محاسبات مستقیم نیرو و گشتاور را در محل تماس امکانپذیر میسازد.
WOM که برای سهولت استفاده طراحی شده است، به طور یکپارچه با فناوریهای حسگر موجود، از جمله حسگرهای دما، حسگرهای فشار، حسگرهای سرعت لغزش، WFTها و دوربینها ادغام میشود. از نظر مجموعه دادهها، اساساً قابلیتهای آزمایش در سطح آزمایشگاهی را مستقیماً بر روی یک وسیله نقلیه در حال حرکت فراهم میکند.
چه چیزی این فناوری را در مقایسه با روشهای اندازهگیری قبلی پیشگام میکند؟
قبل از WOM، هیچ فناوری نمیتوانست چسبندگی واقعی تایر به جاده را در محل تماس، از جمله زوایای چرخ نسبت به زمین، تحت هیچ شرایط واقعی اندازهگیری کند. این همان چیزی است که این فناوری را منحصر به فرد میکند.
برخی از بزرگترین چالشها در ثبت دقیق این اندازهگیریهای دنیای واقعی چه بودند؟
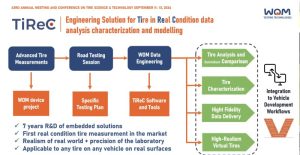
توسعه فناوری حسگر که قادر به اندازهگیری در تمام سطوح، از جمله یخ، جادههای مرطوب و سایر شرایط دنیای واقعی باشد. ایجاد دستگاههای ماژولار سازگار با هر چرخ روی هر وسیله نقلیه که با فناوری حسگر چندگانه قابل ادغام باشد. ایجاد یک گردش کار مهندسی که دادههای دنیای واقعی را به مدلهای مجازی تایر قابل استفاده و بسیار واقعگرایانه پردازش میکند و در عین حال بر محدودیتهای اندازهگیریهای جادهای غلبه میکند – که به عنوان TiReC (راهکار مهندسی تایر در شرایط واقعی) شناخته میشود.
چه مطالعاتی را برای اثبات اثربخشی تجهیزات انجام دادهاید و نتایج چه بوده است؟
از آنجایی که WOM اولین فناوری است که قادر به ثبت دادههای تایر در دنیای واقعی است، هیچ “فناوری اعتبارسنجی” دیگری وجود ندارد. با این حال، ما مقایسهای پشت سر هم از دو مدل تایر انجام دادیم – یکی با استفاده از TiReC و دیگری بر اساس آزمایش سنتی در فضای داخلی.
ما هر دو مدل را در یک شبیهساز رانندگی پویای حرفهای آزمایش کردیم و دو راننده به طور مستقل تأیید کردند که مدل مبتنی بر TiReC به طور قابل توجهی به عملکرد دنیای واقعی نزدیکتر است.
علاوه بر این، ما روش TiReC را در یک سناریوی مسیر خیس به کار بردیم و به شرکای خود این امکان را دادیم که یک سیستم کنترل پایداری الکترونیکی را به طور کامل در یک محیط مجازی توسعه دهند – و نیاز به نمونههای اولیه فیزیکی را از بین ببرند، چیزی که قبلاً در توسعه سنتی خودرو بدون مدلهای دقیق خیس غیرممکن بود.
در مورد ثبات اندازهگیری، ما دادههای خود را با مقایسه پارامترهای کلیدی در برابر سایر فناوریهای تثبیتشده اعتبارسنجی کردیم و همبستگی قوی را نشان دادیم. ما همچنین اعتبارسنجی تکرارپذیری را در هر دو شرایط ایستا و پویا پیادهسازی کردیم و نتایج برجستهای به دست آوردیم. این روش به مثلثبندیهای نوری متعدد متکی است که ذاتاً دقت و قابلیت اطمینان را از طریق فناوری حسگری تثبیتشده تضمین میکند.